144
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДИКИ И АППАРАТУРА
АППАРАТУРНАЯ МЕТОДИКА ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ВОСПРИЯТИЯ ВРЕМЕНИ И
ФОРМИРОВАНИЯ ЧУВСТВА ВРЕМЕНИ
С. Н. СЕРГЕЕВ
Общеизвестно, чти восприятие времени — это отражение
объективной длительности, скорости и последовательности явлений действительности.
Изучение его ведется по таким важнейшим характеристикам, как точность оценки,
отмеривания, воспроизведения, дифференцирования интервалов времени, темпа и
ритма.
Процедура исследования восприятия времени
осуществляется в два этапа: задание необходимого временного параметра и регистрация
точности восприятия его испытуемым.
Наиболее распространенной аппаратурой для
обеспечения второго этапа являются различного типа секундомеры, промышленные
измерители временных интервалов. В качестве же устройств, обеспечивающих
задание необходимых временных характеристик, применяются метрономы, магнитофонные
записи, времязадающие программные устройства, ритмолидеры [1],
[4] и др.
Однако недостатками известных устройств является
ограниченность функциональных возможностей, узкоспецифичность применения,
сложность программирования, недостаточная точность.
В связи с этим целью создания прибора явилось
расширение функциональных возможностей путем объединения в нем задающего
длительность, темп, ритм и регистрирующего устройств, повышение технических
характеристик.
Предлагаемый прибор сконструирован совместно с
инженером Н.А. Кривошея [2]. На рис. 1 представлена
функциональная схема разработанного устройства, на рис. 2 — блока управления.
Устройство (рис. 1) содержит блок (1) датчиков
ответных действий испытуемого, блок (2) индикации, звуковой генератор (3), блок
(4) задания режима работы (ациклический—циклический), блок (5) задания ритма,
блок (6) генераторов пилообразного напряжения, блок (7) сравнения, блок (8)
ключей, блок (9) управления, элементы памяти (10) и коммутатор (11).
Блок (9) управления (рис. 2) содержит генератор (12)
импульсов, элемент (13) памяти, инвертор (14), ключи (15), (16) и формирователь
(17) импульсов «сброс».
Прибор работает следующим образом.
Необходимые временные параметры задаются с блока (5)
задания ритма. При поступлении пускового сигнала с блока (1) датчиков ответных
действий испытуемого, включенного на вход блока (4) задания режима работы,
пусковой импульс напряжения, соответствующий 1-й программе, поступает на первый
вход блока (8) ключей, размыкает выход блока (6) генераторов пилообразного
напряжения со своим входом, подключает постоянное напряжение с блока (5)
задания ритма к входу блока (6) и подает напряжение команды «Пуск» через
генератор (12) импульсов на элемент (13) памяти блока (9) управления, который
одной парой контактов самоблокируется, второй парой контактов размыкает выход
от одного входа элемента памяти (10) и подключает через входное сопротивление
блока (5) задания ритма напряжение на ключ (16) и на один вход элемента памяти
(10), выходное напряжение которого падает. Таким образом, осуществляется
одномоментный запуск задающего и регистрирующего частей устройства.
Одновременно с других контактов блока (8) ключей выдаются управляющие сигналы в
звуковой генератор (3) (тональных частот) для включения тона 1-й программы и в
блок (2) индикации
145
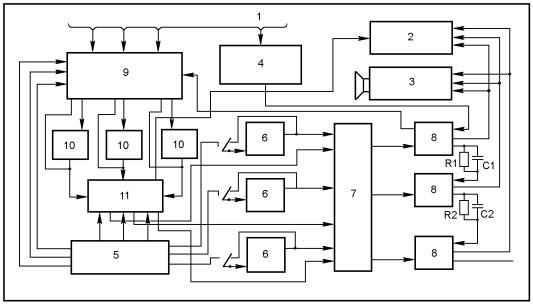
Рис. 1. Функциональная схема
устройства
для включения световой сигнализации или управляемого
устройства.
Так как поступающее в начальный момент на одном из входов
блока сравнения (7) напряжение с блока (6) генераторов пилообразного напряжения
остается меньшим, чем поступающее с блока (5) задания ритма через коммутатор II
на второй вход блока (7) сравнения, потенциал на его выходе остается
неизменным, а блок (8) ключей самоблокируется.
Линейно падающее напряжение с блока (6) генераторов
пилообразного напряжения, вырабатываемое с фиксированной крутизной, через
программируемое время достигает на входе блока (7) сравнения уровня, заданного
с блока (5) задания ритма, при этом сигнал на выходе блока (7) изменяет свою
полярность на противоположную, чем закрывает блок (8) ключей, контакты реле
которого переходят в исходное состояние, отключает подачу сигналов на звуковой
генератор (3), в блок (3) индикации и разрывают цепь самоблокировки. Кроме
того, отключают подачу входного напряжения на вход блока (6) генераторов
пилообразного напряжения, а его вход соединяют с выходом, на котором
устанавливается нулевой потенциал. Через R1C1 — цепь в блок (8) ключей подается кратковременный импульс пуска 2-й
программы, которая работает аналогично 1-й программе, с той лишь разницей, что
с блока (8) команда «Пуск» не подается в блок (9) управления.
Аналогично реализуются последующие программы.
Контроль реально выполняемого ритма движений
происходит пои условии поступления сигнала отдатчиков блока (1) ответных
действий испытуемого, фиксирующих этапы протекания двигательного действия, на
вход блока (9) управления, в результате чего инвертор (14) срабатывает и
самоблокируется своими контактами через формирователь (17) импульсов, что
приводит к размыканию одного входа элементов (10) памяти, напряжение на выходе
которого с этого
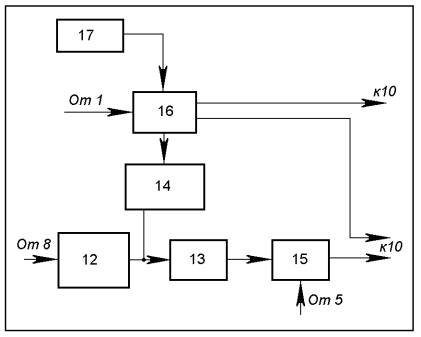
Рис. 2. Функциональная схема блока
управления
146
момента остается неизменным на достигнутом уровне, и
к снятию самоблокировки с элемента (13) памяти (сигнал с которого отключает
ключ (15) напряжение с блока (5) задания ритма и подготавливает цепь замыкания
входов элементов (10) памяти с выходами. Одновременно с инвертора (14) поступает
напряжение команды «Пуск» на элемент (13) памяти для запоминания команды «Пуск»
2-го временного интервала и т. д.
По окончании реализации всех программ в коммутатор
II поступают с одной стороны части напряжения потенциометров блока (5) задания
ритма, соответствующие 1-й, 2-й и n-й программе
(программируемый ритм), а с другой стороны — напряжение с выходов элементов
(10) памяти, соответствующие реально выполненному ритму. Напряжения имеют
единый масштаб. С помощью коммутатора II они поочередно подключаются к входам
стрелочного измерительного прибора блока (3) индикации, который показывает их
алгебраическую сумму (разность между заданным и реально выполненным временным
параметром).
После считывания отклонений реального ритма от
заданного кнопкой формирователя (17) импульсов «сброс» производится снятие
самоблокировки всех элементов блока (9) управления, контакты которых переходят
в нормально замкнутое состояние и замыкают входы элементов (10) памяти с их
выходами, в связи с чем на выходах элементов (10) устанавливается нулевой потенциал.
Блок (2) индикации в этом случае показывает программируемое время по
установленной программе.
Задание необходимого временного параметра
осуществляется путем подачи одиночных или повторяющихся серий звуковых или
световых сигналов, различающихся по длительности и высоте тона, в зависимости
от режима работы устройства (ациклический—циклический). Запуск прибора может
осуществляться местно или дистанционно с помощью различного рода датчиков
(контактные, фото-, тензо-, сенсорные и др.). Точность программирования и считывания
интервалов времени — 0,01 с в пределах 2-х диапазонов: 0,01—1 с и 0,1—10 с
(могут быть введены диапазоны 1—100 с и т. д.). Погрешность воспроизведения времени
не более 0,1 %.
Устройство может быть использовано для исследования
скорости реакции на различные раздражители (световой, звуковой, механический),
для формирования профессиональных навыков операторов и в автоматике для
управления исполнительными устройствами, требующими для своей работы временной
программы, которая по характеру работы устройства должна часто перестраиваться.
Успешное обучение и совершенствование двигательным
действиям возможно при условии формирования правильного представления их
структуры, путем создания богатого чувственного образа на основе активизации
различных сенсорных систем и обеспечения обратной связи для сличения
выполненных действий с имеющимся эталоном и последующей их коррекции.
Предложенное устройство позволяет создать
ритмическую, темповую модель разучиваемого двигательного действия, а также
обеспечить подачу срочной объективной информации в цифровом виде о расхождении
реально выполненных и эталонных временных параметров для коррекции движений.
С целью проверки эффективности методики формирования
рационального ритма двигательных действий были проведены экспериментальные
исследования [3]. В эксперименте приняли участие 20 квалифицированных
гимнасток, из числа которых были созданы две равноценные группы (экспериментальная
и контрольная) по 10 спортсменок в каждой. В качестве предмета совершенствования
был выбран опорный гимнастический прыжок переворот вперед с поворотом — сальто
назад в группировке.
После определения индивидуально для каждой
гимнастики оптимального ритма опорного прыжка посредством многократной (не
менее 20 раз) объективной регистрации его временных характеристик и качества
исполнения с последующей математической обработкой в тренировочный процесс
спортсменок экспериментальной группы вводилась предложенная нами методика
совершенствования рационального ритма двигательных действий.
Условия
применения ее были следующими. На приборе устанавливались необходимые временные
характеристики опорного прыжка. Устройство позволяет осуществлять
программирование временных интервалов легко и оперативно. Нажимом кнопки
переключателя и поворотом ручки потенциометра 1-й программы по стрелочному измерительному
прибору выставляется величина 1-го временного параметра. Включением кнопки
переключателя и поворотом ручки потенциометра 2-й программы по тому же
стрелочному измерительному прибору устанавливается значение 2-го интервала
времени и т. д., после чего нажимом на кнопку переключателя «работа» устройство
приводится в состояние готовности к пуску. Таким образом, тщательное
программирование
147
временных характеристик опорного прыжка
осуществляется в предельно короткие сроки (0,5—1 мин), что позволяет быстро
перестраивать программы, обеспечивая индивидуальный подход при высокой
плотности тренировочных занятий.
Каждый раз непосредственно перед выполнением
опорного прыжка гимнастка прослушивала с помощью устройства заданный ритм
движений, отражающий быстроту пробегания последних 5 м разбега (1-я программа),
время с момента постановки ног на гимнастический мостик до начала толчка руками
о коня (2-я программа) и длительность опоры на гимнастическом коне (3-я
программа).
После предварительной звуковой настройки на
необходимый ритм опорного прыжка гимнастка приступала к его выполнению.
Инструктирование на данном этапе сводилось к необходимости, соизмеряя свои
движения, в точности совместить ритмический рисунок производимых движений с ритмом,
заданным устройством. Начало звуколидирования и регистрации реально выполняемых
временных характеристик опорного прыжка осуществлялось с момента пересечения
гимнасткой луча фотодатчика.
По окончании выполнения опорного прыжка спортсменка
осведомлялась о расхождении реально выполненного ею и эталонного ритмов опорного
прыжка с помощью нашего прибора и датчиков, установленных: 1) на линии разбега
— фотодатчик, 2) в гимнастическом мостике — контактный датчик, 3) на
гимнастическом коне — сенсорное поле с сенсорным датчиком и 4) в месте
приземления гимнастки под гимнастическими матами — контактная площадка. В
последующую попытку выполнения опорного прыжка вносились коррективы и все три
этапа повторялись снова.
Тренировочный процесс гимнасток контрольной группы
осуществлялся по общепринятой в практике спортивной гимнастики методике
обучения опорным прыжкам.
На совершенствование техники опорного прыжка
гимнасткам обеих групп отводилось 10 тренировочных занятий по 10 попыток в
каждом занятии, после чего проводилось повторное тестирование уровня владения
техникой исполнения данного прыжка.
Применение предложенной методики в тренировочном
процессе экспериментальной группы гимнасток позволило в сжатые сроки
существенно повысить технический уровень и стабильность исполнения опорного
прыжка в среднем с 8,83±0,11 до 9,21 ±0,08 (р<0,01), а также улучшить
некоторые временные характеристики фаз опорного прыжка. В то же время в
контрольной группе гимнасток статистически достоверные улучшения не наблюдались
(8,85±0,13 и 9,03± ±0,14 при р>0,05).
Проведенные нами исследования показали высокую
эффективность предложенного технического средства и позволяют рекомендовать его
широкое использование при обучении двигательным действиям в различных видах
спорта и трудовой деятельности.
1. Болбат В. И., Чеботарев В. В., Бакаринов Ю. М. Многопрограммный
ритмолидер для обучения циклическим и ациклическим движениям // Электроника и
спорт. Л., 1972.
2. Сергеев С. Н., Кривошея Н. А. Устройство для обучения спортсменов
ритму движений: Авт. свид. СССР № 1295433. Бюл. № 9. 1987.
3. Сергеев С. Н. Некоторые вопросы совершенствования сенсорно —
перцептивной организации личности в спортивной гимнастике // Морально-волевая и
специальная психологическая подготовка спортсменов. Киев, 1987.
4. Шпынов Г. А. Электронно-световой лидер для тренировки спортсменов:
Авт. свид. СССР № 971371. Бюл. № 41. 1982.
Поступила в редакцию 19.III 1990 г.