158
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДИКИ И АППАРАТУРА
ПРИБОРЫ ДЛЯ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ ПСИХОФИЗИОЛОГИЧЕСКИХ ФУНКЦИЙ ОПЕРАТОРОВ
В.П. ГРЕБНЯК, И.П. ЖУЧЕНКО, В.П. БЕБЫХ
Способность оператора к сохранению требуемых рабочих качеств в условиях усложнения производственной обстановки определяется состоянием церебральной системы, обеспечивающей организацию целенаправленного акта поведения [6], [7]. Исследование интегративных свойств нервной системы операторов движущихся систем управления в значительной мере связано с изучением свойств внимания и сенсомоторной сферы. Широко распространенные приборы для этих исследований обеспечивают в основном определение состояния функций в обычных условиях. Выявление же уровня специфической устойчивости этих функций предусматривает введение в процесс исследования профессионально значимых факторов деятельности [2], [5], [8].
Характерной особенностью профессиональной деятельности операторов движущихся систем управления является временная неопределенность появления сигналов при различных параметрах траектории наблюдаемых объектов. С учетом данных факторов разработаны приборы для исследования произвольного внимания при дифференцированном определении траектории заданного объекта в регламентируемом режиме слежения и устойчивости координации двигательных актов.
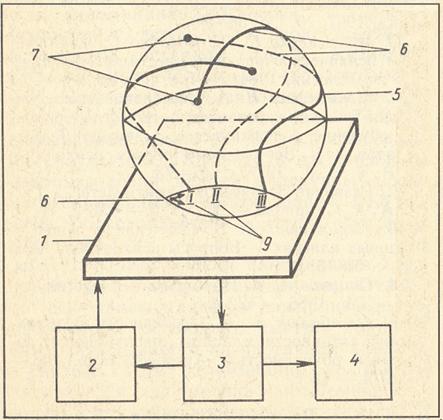
Рис.1
Определение устойчивости произвольного внимания у операторов движущихся систем проводится на приборе [9], содержащем блок выдачи тестов 1, представляющий собой прозрачный, усеченный у основания шар 5, установленный на приводе вращения 6. На поверхности шара располагаются сигнализаторы тестов 7 в виде лампочек накаливания и графическое изображение 8 тест-задания — «перепутанные линии», являющееся также и электрической связью сигнализаторов тестов с соответствующими цифровыми номерами 9 (рис. 1). При проведении исследования посредством блока программного коммутатора 2 задается направление вращения блока выдачи тестов со скоростью 30—120 град/с и включается определенная лампочка сигнализатора теста. Испытуемый, проследив взглядом графическое изображение тест-задания и определив порядковый номер линии, нажимает соответствующую кнопку на пульте 3. Цифровые кнопки на пульте испытуемого расположены в случайном порядке, что исключает возможность запоминания. Независимо от точности определения и фиксирования посредством пульта испытуемого порядкового номера линии программный коммутатор задает необходимое направление блоку выдачи тестов и через определенное время включает следующий сигнализатор. Блок регистрации 4 фиксирует точность и время выполнения задания, на основании которых рассчитывается показатель произвольного внимания [3]:
![]()
где Р — уровень произвольного внимания, усл. ед;
159
М — общее количество тестов (М=8); Н — количество ошибок; Т — общее время выполнения тестов, с; 0,01 — условный коэффициент.
Получив задание проследить линию от сигнализатора до соответствующего ей номера на основании шара, испытуемый концентрирует внимание на заданной линии и осуществляет зрительное прослеживание траектории линии с учетом скорости и направления движения шара. Восприятие и переработка информации о параметрах «движущейся» линии усложнены необходимостью дифференцированного выделения ее из всей совокупности линий с обеих сторон прозрачного шара. Определив порядковый номер линии, испытуемый находит соответствующую цифровую кнопку на пульте.
Как видно, показатель произвольного внимания в данном случае в значительной мере обусловлен способностью пространственной дифференцировки расположения значимого объекта и устойчивостью индикации траектории его в заданном режиме слежения, т.е. в условиях дефицита времени, а также временной неопределенности предъявления сигналов.
Прибор для исследования координации движения рук [10] позволяет определять устойчивость координации управляющих действий оператора в обычных условиях при пространственной неопределенности предъявления и в заданном темпе выполнения задания. Он изготовлен на основе координометра Руппа, содержащего панель с расположенными на ней сегментными жидкокристаллическими индикаторами 1 образующими геометрическую фигуру, и манипулятор с фотоэлементом 2 (рис. 2).
В режиме 1 исследуется координация движения рук в обычных условиях при выполнении задания в свободном темпе. Посредством блока 6 программного управления отключается пороговый элемент 8 переключения индикаторов и задающий генератор 9. Блок программного коммутатора 10 обеспечивает включение сегментных индикаторов, высвечивающих определенную геометрическую фигуру. Испытуемый с помощью манипулятора должен передвигать фотоэлемент 2 точно по линии геометрической фигуры.
В режиме 2 исследуется координация движения рук при пространственной неопределенности предъявления задания. Блоком 6 программного управления включается пороговый элемент 8 переключения индикаторов в задающий генератор 9. Программный коммутатор 10 высвечивает первые два индикатора, имеющие различную интенсивность свечения. Движением ручек манипулятора испытуемый передвигает фотоэлемент 2 по ходу высвечиваемой геометрической линии. При переходе с первого индикатора на второй, имеющий большую интенсивность свечения, происходит изменение величины тока в цепи фотоэлемента 2 на определенную величину. Пороговый элемент 8 переключения индикаторов, настроенный на это изменение величины тока, осуществляет запуск задающего генератора 9, который посылает управляющие импульсы на программный коммутатор 10. В результате включается третий индикатор, который имеет такую же интенсивность свечения, как и первый. Испытуемый продолжает передвигать фотоэлемент 2 точно по ходу уже второго индикатора и т.д. Таким образом, пороговый элемент переключения индикаторов, настроенный на два порога срабатывания, согласно двум уровням интенсивности высвечивания индикаторов, позволяет через задающий генератор и программный коммутатор предъявлять в условиях пространственной неопределенности элементы геометрической линии.
В режиме 3 исследуется координация движений рук при заданном темпе выполнения задания. Блоком 6 программного управления отключается пороговый элемент 8 переключения индикаторов и переводится задающий генератор 9 в автономный режим. Генератор 9 с определенной частотой посылает импульсы, которые последовательно переключают программный коммутатор 10, высвечивающий индикаторы. Испытуемый передвигает фотоэлемент 2 точно по ходу геометрической линии как можно точнее и быстрее, соразмерно со скоростью предъявления линии.
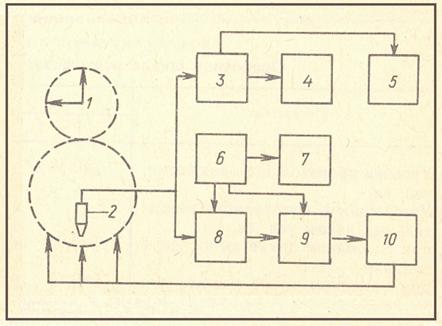
Рис. 2
При проведении исследования времяизмерительным устройством 7 фиксируется общее время выполнения задания. Ошибочное движение испытуемого вызывает срабатывание
160
порогового элемента 3, осуществляющего регистрацию ошибки счетчиком 5 и запуск блока 4 измерения общего времени ошибки. При возвращении испытуемым фотоэлемента 2 на поле высвечиваемой геометрической линии пороговый элемент 3 ошибочных движений возвращается в исходное состояние и отключается блок 4 времени ошибочных движений. На основе полученных показателей (количество ошибочных движений, время ошибочных движений, общее время выполнения заданий) рассчитывается коэффициент устойчивости координации двигательных актов [3]:
![]()
где К — коэффициент устойчивости координации двигательных актов, усл. ед.; Тоб — общее время выполнения задания, с; Тош — общее время ошибочных движений, с; Н — количество ошибок; σо6, σош, σн — среднеквадратические отклонения при свободном темпе выполнения задания, равные соответственно 26,0; 8,1; 12,1, а при заданном темпе выполнения задания — 7,4; 8,1; 7,0.
Для количественной оценки показателей произвольного» внимания и координации двигательных актов при экспертизе профессиональной надежности были разработаны пятибалльные шкалы. Поскольку данные показатели распределяются по нормальному закону, представилось правомерным для количественной градации оценочных шкал использовать величину среднеквадратического отклонения. Условной точкой отсчета служила среднеквадратическая выборочной совокупности каждого признака [1], определенная у практически здоровых операторов, успешно выполняющих свои производственные обязанности. Допустимый предел искомых функциональных показателей при определении профессиональной надежности ограничен баллом [3].
Разработанные приборы в течение трех лет применяются для определения степени профессиональной надежности машинистов горновыемочных и горноподъемных машин ведомственной Министерства угольной промышленности УССР лаборатории профессионального отбора горнорабочих. Результаты корреляционного и регрессионного анализа позволили установить значимый уровень взаимосвязи между критериями профессиональной надежности (по уровню аварийности и частоты травмирования по «личностному фактору») машинистов и показателями произвольного внимания (τ =0,17; η=0,51) и координации двигательных актов (τ =34; η=0,49). При этом важно отметить, что парные коэффициенты корреляции и корреляционные отношения критериев профессиональной надежности с показателями внимания (переключение и распределение) и координации движений, полученные при использовании таблицы Шульте — Платонова и координометра Руппа, были ниже (соответственно τ =0,16— 0,19; η =0,27—0,31 и τ =0,18; η =0,24), что свидетельствует об их меньшей информативности отражения профессионально значимых качеств операторов движущих систем управления шахтным транспортом [4] (табл.).
Таким образом, полученные данные свидетельствуют о целесообразности применения разработанных приборов для оценки произвольного внимания и координации двигательных актов при профессиональном отборе операторов, деятельность которых связана с необходимостью пространственного определения расположения объекта, дифференцировки траектории его в условиях дефицита времени при регламентированном режиме слежения и временной неопределенности появления сигналов, а также требует устойчивой координации управляющие действий.
Оценочная шкала психофизиологических показателей оператора
|
Показатели |
Баллы |
||||
|
5 |
4 |
3 |
2 |
1 |
|
|
Уровень произвольного внимания, усл.ед. |
≥0,40 |
0,39—0, 25 |
0,24-0,14 |
0,13—0,04 |
≤0,03 |
|
Устойчивость координации двигательных актов, усл.ед. |
|
|
|
|
|
|
при свободном темпе выполнения задания |
≥0,28 |
0,27—0,20 |
0,19—0,15 |
0,14—0,1 |
≤0,09 |
|
при заданном темпе выполнения задания |
≥0,16 |
0,15—0,12 |
0,11—0,09 |
0,08—0,06 |
≤0,05 |
161
1. Гребняк В. П., Базаров Г. М., Вировец Е. Н. и др. Физиологические и психофизиологические методы профессионального отбора горнорабочих глубоких шахт (методические указания). — Донецк, 1974. — 25 с.
2. Горбов Ф. Д. О помехоустойчивости оператора. — В кн.: Инженерная психология / Сб. ст., пер. с англ. М., 1964. С. 340—357.
3. Жуненко И. П., Гребняк В. П. Психофизиологические методы прогнозирования и повышения профессиональной надежности машинистов шахтных машин и внутришахтного транспорта (методические рекомендации). — Донецк, 1982. — 12 с.
4. Жученко И. П. Гигиенические особенности условий труда и психофизиологические критерии профессиональной надежности машинистов внутришахтного транспорта: Автореф. канд. дис. — Киев, 1983. —20 с.
5. Ломов Б. Ф., Рубахин В. Ф., Венда В. Ф. Инженерная психология. — М., 1977. — 302 с.
6. Небылицын В. Д. К проблеме мозговых механизмов индивидуально-психологических различий у человека. — В кн.: Нейрофизиологические механизмы психической деятельности человека / Под ред. Н.П. Бехтереквой. Л., 1974. С. 118—123.
7. Небылицын В. Д. Психофизиологическое исследование индивидуальных различий. — М., 1976. С. 194—207.
8. Нерсесян Л. С., Конопкин О. А. Инженерная психология и проблема надежности машиниста. — М., 1978. —237 с.
9. Устройство для исследования основных свойств внимания испытуемого. Авт. изобр. И.П. Жученко, В.П. Бебых, Е.Я. Гаркавый, В.М. Зеров. — Бюллетень открытий, изобретений. 1979. № 29. А. С. 678499 (СССР).
10. Устройство для исследования координации движения рук. Авт. изобр. И.П. Жученко, В.П. Бебых. — Бюллетень открытий, изобретений. 1982. № 31. А. С. 952213 (СССР).
Поступила в редакцию 28.IX