79
ДИНАМИКА ПСИХОЛОГИЧЕСКОЙ РЕФРАКТЕРНОСТИ В ДВИГАТЕЛЬНОМ АКТЕ
Н. Д. ГОРДЕЕВА
Понятие психологической рефрактерности, обозначающее задержку времени реакции в ответ на второй из двух следующих друг за другом сигналов, в его современном виде было определено в работах Крайка [10], Вине [17], Уэлфорда [18] и др., исследовавших этот феномен в ситуациях, имитирующих деятельность оператора.
Основной методический прием, использованный в этих исследованиях, заключался в предъявлении испытуемому в быстрой последовательности двух или более сигналов, на которые он должен был отвечать какой-либо двигательной реакцией: нажатие на кнопку, клавишу, ключ и т. п. В результате исследований было выдвинуто немало гипотез для объяснения этого явления. Наиболее распространенной является гипотеза, основанная на представлении об одноканальности процесса обработки информации. По выражению Уэлфорда, существуют как бы «ворота», которые закрыты для любой входной информации до тех пор, пока идет переработка ранее полученной [20]. Известна также гипотеза вероятностного ожидания, согласно которой появление и отработка первого сигнала ведет к резкому снижению субъективной вероятности появления следующего, что и приводит к увеличению времени [16]. Существуют многочисленные гипотезы, связывающие явления рефрактерности с задержками восприятия поступающей информации. Гипотеза «перцептивного квантования» Бродбента определяет задержку реакции на второй сигнал величиной кванта, равного 300 мс. Согласно еще одной группе гипотез явление рефрактерности связано с функционированием эффекторного звена. Рейнольде сформулировал гипотезу «привычного ответа», из которой следует, что увеличение времени на второй из пары сигналов происходит в результате преодоления инерции после совершения первого действия. Однако в работах таких авторов, как Дэвис, Мэрилл, Адаме, Кример, Лоуренс, Боргер [11], [13], [14], [16], [19], высказанные гипотезы подверглись критике и были частично или полностью опровергнуты.
Подобные противоречивые объяснения связаны с тем, что почти во всех работах явление психологической рефрактерности, во-первых, изучалось на элементарных, стереотипных движениях, время на организацию которых очень мало; во-вторых, анализировалось лишь время реакции, изолированное от самого действия, и, в-третьих, не учитывалась локализация второго сигнала относительно структуры первого действия. Сказанное свидетельствует о том, что явление психологической рефрактерности нуждается в дальнейших исследованиях.
Задачи исследования. В настоящей работе в качестве объекта изучения было взято дискретное действие, совершаемое за 1 —1,2 с и включающее в свой состав когнитивные компоненты: латентную стадию и
80
стадию контроля и коррекций и моторный компонент — стадию реализации.
С помощью методов микроструктурного анализа [3] можно анализировать поведение каждого компонента сенсомоторного действия, не изолируя его от других и тем самым не нарушая целостности действия. Эти методы позволили также начать изучение достаточно сложных взаимоотношений и взаимовлияний, представленных в виде обмена функциями и обмена временем функционирования между когнитивными и моторными компонентами сенсомоторного действия [3]. Для объяснения указанных эффектов была выдвинута гипотеза о гетерогенности как функциональной структуры целостного действия, так и каждого из конституирующих его компонентов [5].
Можно предположить, что значения психологического рефрактерного периода будут не одинаковы в случаях, когда второй сигнал будет по-разному локализован не только относительно пространственно-временной оси целостного действия, но и относительно его компонентов. Как указывалось в многочисленных исследованиях рефрактерности, второй сигнал предъявлялся преимущественно в стадии латентного периода ответа на первый сигнал. Представляет интерес выяснение того, изменятся ли значения рефрактерного периода при предъявлении второго сигнала на стадиях реализации, контроля и коррекций целостного действия по сравнению с предъявлением его в латентный период. Мы исходили из того, что изучение динамики психологического рефрактерного периода в зависимости от локализации второго сигнала в стадиях действия позволит получить новые данные в пользу гипотезы гетерогенности его когнитивных и моторных компонентов.
Таким образом, перед нашим исследованием стояли две взаимосвязанные задачи: изучение динамики психологического рефрактерного периода и проверка гипотезы о гетерогенности компонентов целостного действия.
Методика эксперимента. Исследование проводилось на экспериментальном стенде, состоящем из цветного телевизионного индикатора, трехстепенной ручки управления (манипулятора), средств регистрации и анализа. Экспериментальный стенд был стыкован с ЭВМ-М-6000, которая использовалась в активном режиме [1]. Тестовый материал представлял собой расположенные на горизонтальной оси индикатора светящиеся зеленые пятна (цели) квадратной формы, одинакового размера (ЮХЮ мм), предъявляемые по сигналу экспериментатора от управляющей ЭВМ по определенной программе. Управляемое пятно было красного цвета, величина его точно соответствовала размерам тестового пятна. При совмещении управляемого пятна с тестовым образовывалась четкая цветовая граница, что способствовало более точному их совмещению. Стартовая позиция находилась в левой части экрана, куда испытуемый возвращался после отработки каждой пробы, ожидал предъявления следующей и отрабатывал ее.
В эксперименте принимали участие трое испытуемых — сотрудники факультета психологии МГУ, имеющие навык работы на данном экспериментальном стенде.
Экспериментальный цикл состоял из 3 серий: фоновой, основной и контрольной. В фоновой серии испытуемым предъявлялась одна цель, с которой он должен был по сигналу экспериментатора точно совмещать управляемое пятно.
Методическим приемом основной серии было введение возмущения-сбоя, предъявлявшегося с разным временем запаздывания относительно появления первой цели. Эксперимент, состоящий из 250 проб, строился следующим образом: в 60% случаев пробы были аналогичны фоновым, т. е. предъявлялась одна цель и после ее отработки испытуемый возвращался
81
в стартовую позицию. В 40 % случаев проба состояла из двух сигналов-целей, последовательно появляющихся с варьируемым по заданной программе временным интервалом в пределах 50—1200 мс от момента предъявления первой цели с шагом 50 мс. Таким образом, экспериментальной переменной было время задержки второй цели относительно появления первой.
Инструкция требовала от испытуемого точного совмещения управляемого пятна с появившейся целью. Испытуемые работали в комфортном для них режиме скорости. При появлении второй цели вводился приоритет в ее обслуживание: в этом случае испытуемые должны были прекратить движение к первой цели и быстро и точно совместить управляемое пятно со второй целью. Фоновые и основные пробы обрабатывались отдельно. (
С каждым испытуемым было проведено по 18 экспериментов. Время межстимульного интервала (МСИ) между целями варьировалось как внутри каждого эксперимента, так и между экспериментами.
Контрольная серия состояла из 3 подсерий. Методический прием был тот же, что в основной серии экспериментов. Отличие от основной серии заключалось в том, что в каждой из подсерий испытуемый должен был совершать движения с заданной скоростью: в первой подсерий на быстрой скорости, во второй — на комфортной и в третьей — на медленной. В контрольной серии вторая цель предъявлялась только в стадии реализации первого действия, т. е. в разные моменты движения к первой цели. Инструкция испытуемым была та же, что и в основной серии. В каждой подсерий было проведено по 3 эксперимента по 250 проб в каждом.
Регистрируемые параметры в течение эксперимента записывались на полиграф, на ленте которого содержалась информация о временных и скоростных характеристиках движения руки, управляющей манипулятором. На отдельном канале записывался сигнал от ЭВМ о предъявлении целей и сигнал испытуемого о совмещении с ними управляемого пятна. Запись перехода на цель включала параметрический график зависимости пути от времени и данные о скорости совершаемого движения.
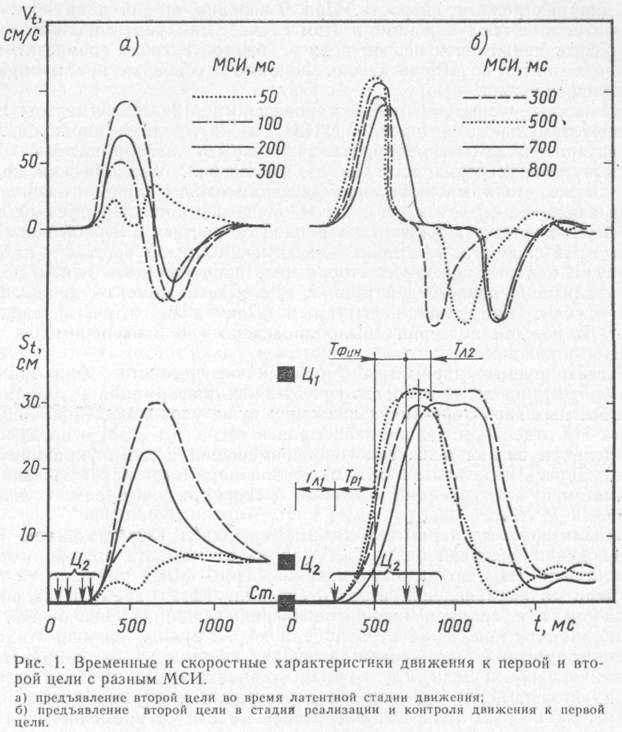
Анализируемые параметры были следующие: ТЛ1 — латентное время движения к первой цели; ТЛ1’ — время от момента подачи второго сигнала-цели (Ц2) до начала движения; TР1 — время движения к первой цели до предъявления второго сигнала; ТФин — время фазы инерционности, т. е. время движения по инерции в направлении первой цели от момента появления второй цели до остановки движения или, в случае отсутствия выраженной остановки, до изменения направления движения к новой цели; ТЛ2— время остановки перед началом движения ко второй цели; ТВР — время перестройки и формирования программы на вторую цель, которое в зависимости от временного интервала и местопопадания второй цели на оси первого движения может выражаться: в латентной стадии первого движения ТВР = Т’Л1+ ТФИН или ТВР = ТФин: в стадии реализации ТВР = ТФин, или ТВР = ТФин + ТЛ2, или ТВР = ТЛ2; в стадии контроля и коррекций ТВР = ТЛ2 (рис. 1а, б). Величина рефрактерности R вычислялась как разность между латентным временем движения к первой цели (ТЛ1) и временем реакции на вторую цель (ТВР).
Кроме того, анализировались временные и скоростные характеристики по стадиям действия при движении к первой и второй цели.
Результаты экспериментов и их обсуждение. Как уже указывалось, отличие данного исследования явления психологической рефрактерности от прежних состояло в том, что изучалось развернутое сенсомоторное действие с достаточно высоким удельным весом собственно моторного
82
компонента, занимавшего более ⅓ от времени выполнения целостного действия и стадией контроля и коррекций, полностью отсутствующей (или скрытой, не регистрируемой) в элементарных движениях (типа нажатия на кнопку). Именно возможность анализа процесса развертывания всех компонентов целостного действия и привела нас к гипотезе об их гетерогенности. Следует сказать, что неоднородность латентной стадии действия была показана ранее [9], [12], [20].
Основываясь на имеющихся уже доказательствах наличия двух типов управления в одном двигательном акте [6], [15], можно предположить, что стадия реализации также неоднородна на всем своем протяжении и что чувствительность различных ее участков может быть неодинакова к сбою, вторгающемуся в привычное протекание процесса. Подобное можно предположить и относительно стадии контроля и коррекции, где выделяются временные интервалы, в которых осуществляются собственно коррекционные процессы, процессы контроля и подготовки программы нового движения.
Фоновая серия экспериментов проводилась с целью изучения зависимости временных и скоростных характеристик когнитивных и исполнительных компонентов действия, а также установления пределов временного разброса для каждой из его стадий. Анализ результатов
83
фоновой серии показал, что исследуемое действие совершается в среднем за 1 —1,1 с. При этом время латентной стадии составляет 280— 320 мс, время стадии реализации 400—450 мс и время стадии контроля и коррекции — 250—300 мс, с разбросом для латентной и контролирующей стадии 50 мс; для стадии реализации — 80 мс.
Анализ результатов основной серии экспериментов дает основание заключить, что латентное время движения к первой цели сопоставимо со значениями латентного времени фоновых проб и не зависит от времени появления второй цели, составляя в среднем 300 мс с разбросом, равным 50 мс. На рис. 1а, б представлены образцы записей временных и скоростных характеристик исследуемого процесса при движении на первую и вторую цели с разными временными интервалами (МСИ) между ними. Временные и скоростные кривые наложены одна на другую для удобства их сопоставления при разных МСИ. Рис. 1а иллюстрирует поведение временных и скоростных параметров при предъявлении второй цели (Ц2) в латентной стадии действия (при МСИ — 50—300 мс). На рис. 16 показано поведение тех же параметров при предъявлении второй цели (Ц2) в стадии реализации (при МСИ —300, 500, 700 мс) и стадии контроля (МСИ — 800 мс). Регистрируемые параметры (ТЛ1, ТР1, ТФин, ТЛ2) показаны на кривой пути от времени выборочно для МСИ — 500 мс. Стрелками обозначены время и локализация второй цели (Ц2) на оси первого движения.
Время реализации первого движения зависит от времени появления второй цели, т. е. чем меньше временной интервал между сигналами, тем меньший путь (а следовательно, и время) проходит рука в направлении к первой цели. Что же касается времени реакции на вторую цель, то оно колеблется в довольно широких пределах и зависит от временного интервала между двумя целями и от локализации второй цели относительно стадий целостного действия, вызванного первым сигналом. Поэтому и величина рефрактерного периода (R) имеет ярко выраженные различия. На рис. 2 представлено поведение кривой рефрактерности в зависимости от времени появления и локализации второй цели относительно стадий первого действия.

В латентной стадии наблюдается последовательное уменьшение значений рефрактерности. В стадии контроля и коррекций после постепенного снижения величины рефрактерности наблюдается ее увеличение, что позволяет говорить о наличии волны рефрактерности в этой стадии действия. В стадии реализации наблюдаются две волны с двумя точками перегиба. Таким образом, можно констатировать, что не только латентная стадия, что согласуется с результатами других исследований [11], [13], [14], но и две другие являются неоднородными по показателям значений рефрактерности, а соответственно и чувствительности к сбою.
Попробуем раскрыть внутренний смысл динамики рефрактерности, обнаруженной в каждой стадии действия. Рассмотрим ситуацию предъявления сигналов, следующих с МСИ, равном 50 мс, в латентной стадии. Поскольку в этом случае значение МСИ минимально, то на основе
84
гипотезы об одноканальности [20] можно было бы ожидать, что второй стимул не окажет влияния на организацию моторного ответа и на характеристики движения к первой цели. Результаты анализа скоростных характеристик показывают наличие взаимовлияния двух стимулов друг на друга, которое выражается в ослаблении действия каждого из них. Особенно это сказалось на скоростных характеристиках движения к первой цели, хотя скорость движения ко второй цели оказывается также существенно меньше скорости движения к этой же цели в фоновых пробах (см. рис. 1а). Чем больше МСИ, тем больший участок пути проходит рука в направлении к первой цели, тем больше время движения и выше максимальная скорость перемещения. Результаты анализа скоростных характеристик движений к первой и второй цели дают основания заключить, что, во-первых, при предъявлении двух следующих друг за другом сигналов обнаружено взаимовлияние их друг на друга и, во-вторых, степень взаимовлияния находится в обратной зависимости от величины интервала между стимулами. Иначе говоря, чем больший участок времени сигналы проходят независимо друг от друга, тем меньше их взаимовлияние и тем более движения, ими вызванные, походят на движения, вызванные на каждый из них отдельно (см. рис. 1а). Эти данные, как указывалось выше, противоречат гипотезе одноканальности процесса переработки информации. Если принять эту гипотезу, то о влиянии второго сигнала на первый не может быть и речи. Наши данные свидетельствуют не только о влиянии второго на первый сигнал, но, что особенно интересно, и о влиянии первого сигнала на второй. Как указывалось выше, степень взаимовлияния не постоянна и зависит от интервала между ними. Взаимовлияние двух сигналов, выражающееся в уменьшении максимальной скорости перемещения к обеим целям, свидетельствует о том, что они одновременно могут находиться в стадии организации моторного ответа, т. е. «ворота» Уэлфорда оказываются открытыми для приема новой порции информации, в то время как еще идет переработка ранее полученной. Дискретность процессов построения действия, постулируемая 3-компонентной моделью Уэлфорда, не вызывает сомнения, в то время как его предположение о независимости между выделенными им стадиями противоречит полученным нами результатам.
Именно из-за того, что степень влияния двух сигналов особенно высока при минимальных МСИ, равных 50 мс, времени на организацию ответа на второй сигнал требуется на 100—200 мс больше, чем на организацию ответа на первый сигнал, что и выражается в высоких значениях показателя рефрактерности (см. рис. 2). По мере увеличения интервала между двумя сигналами действие одного на другой ослабляется и времени на организацию ответа на второй сигнал требуется меньше, соответственно и значения показателя рефрактерности уменьшаются. При еще больших МСИ, когда появление второй цели практически совпадает с началом движения руки к первой цели, совершаемое движение, достигая зоны первой цели (без периода контроля за осуществившимся движением и без латентного периода предстоящего движения) плавно переходит в направлении второй цели. В этом случае время реакции (ТВР) на вторую цель практически сопоставимо со значениями латентного периода движения к первой цели. Минимальные значения показателя рефрактерности в этом случае можно объяснить тем, что к моменту появления второй цели уже завершена работа по организации ответа на первую цель и второй сигнал беспрепятственно проходит все стадии когнитивного компонента действия — от приема информации до организации нового моторного ответа. Иными словами, во время осуществления движения к первой цели не только модифицируется функциональная структура действия, но и полностью завершаются
85
процессы организации движения ко второй цели. Таким образом, в условиях предъявления двух целей, разделенных периодом, равным 300 мс, когнитивные стадии, связанные с организацией движения ко второй цели, могут осуществляться одновременно с исполнительными стадиями, т. е. одновременно с движением к первой цели. Это свидетельствует о возможности параллельной работы когнитивных и исполнительных компонентов действия при организации разных двигательных задач.
Описанная картина сохраняется и в течение последующих 50 мс при предъявлении второй цели в самом начале движения к первой, т. е. наблюдается полное отсутствие латентного периода (ТЛ2), который должен был бы предшествовать движению ко второй цели. Время реакции (Твр) на вторую цель состоит целиком из фазы инерционности (ТФин), равной 320—350 мс. Таким образом, при предъявлении второй цели в самом начале движения к первой перестройка старой программы в новую и организация программы движения на вторую, неожиданно появившуюся цель полностью осуществляется в течение совершения инерционного движения к первой, уже отсутствующей цели. Иначе говоря, в течение временного интервала, равного в среднем 330 мс, параллельно протекают два, казалось бы, взаимоисключающих процесса: моторный, выражающийся в осуществлении движения к первой цели, и когнитивный, направленный на формирование программы движения к новой цели. Показатель рефрактерности в этот период минимален и равен 20—40 мс. Каким образом это возможно? Согласно данным о наличии двух типов управления в одном двигательном акте [6], движение в начале своем осуществляется по программе, сформированной в стадии организации моторного ответа, и нуждается в текущих коррекциях. Следовательно, если в рассматриваемый момент времени появляется неожиданный сигнал, в когнитивных компонентах, для которых, казалось бы, нет специального места на временной оси, беспрепятственно осуществляются процессы, связанные с организацией ответа на новую цель.
При предъявлении второй цели в последующие 150—200 мс (при МСИ, равном 400—450 мс) наблюдается увеличение рефрактерности. Это объясняется тем, что в этот временной интервал в когнитивных компонентах действия совершается активная работа, связанная с сопоставлением текущих и заданных значений параметра движения, на основании чего формируются программы коррекций первого движения. Поэтому время реакции (ТВР) на вновь появившуюся цель в эти временные интервалы увеличивается и, соответственно, увеличивается и рефрактерность. По мере того как локализация второй цели по пути первого движения все более удаляется от его начала, меняется соотношение фазы инерции и латентного периода на вторую цель. Перестройка и планирование движения на вторую цель уже не может осуществляться в течение фазы инерционности (ТФин), и второй латентный период (ТЛ2) приобретает все больший удельный вес. Наконец в момент перехода стадии реализации первого движения в стадию контроля фаза инерционности становится равной 0. Перестройка движения и организация ответа на новую цель теперь осуществляется во время второго латентного периода.
Кривая рефрактерности при предъявлении второй цели в период стадии реализации первого действия (см. рис. 2) характеризуется, как уже отмечалось выше, волновым характером. Наименьшие ее значения наблюдаются при появлении второго сигнала в самые начальные моменты движения к первой цели и через 300—400 мс после начала движения. Возможное объяснение первому падению кривой рефрактерности, как уже указывалось выше, состоит в том, что в когнитивных
86
компонентах действия завершена организация первого движения и они освободились для приема вновь поступающей информации. Что же касается второго падения кривой, то оно может быть объяснено появлением нового кванта действия. В проведенном ранее исследовании [4] было показано, что при освоении нового сенсомоторного пространства выделяется этап, который характеризуется тем, что единое действие разрывается и превращается в цепь последовательных, относительно самостоятельных действий (квантов), идущих в направлении цели, с отчетливо выраженными собственными программирующими, моторными и контролирующими стадиями. По мере освоения моторного пространства и формирования навыка выделение отдельных квантов действия с помощью имеющихся средств регистрации не представляется возможным. В качестве существенного доказательства наличия квантов в моторной части действия могут служить анализируемые волны рефрактерности, характеристики которых меняются в зависимости от скорости осуществления действия.
Для выяснения этого вопроса была предпринята контрольная серия экспериментов, в которой испытуемые работали с навязанными скоростями: быстрой (близкой и баллистической), комфортной (скорость основной серии) и медленной (при совершении движения за 250—300 мс, 400—500 мс, 1500—1600 мс соответственно). Результаты анализа свидетельствуют о том, что величина рефрактерного периода увеличивается с падением скорости: так, кривая рефрактерности при баллистической скорости располагается в зоне —50 + 50 мс; на комфортной скорости—в зоне 0+100 мс и на медленной — в зоне —50 + 250 мс. Кроме того, поведение кривой рефрактерности различно при разных скоростях. На быстрой скорости, где все движение занимает 250—300 мс, значения рефрактерности при попадании второй цели в самые первые моменты движения к первой составляют —50 мс; при попадании через 100 мс они составляют —25 мс; еще через 100 мс — 0 мс. И только при попадании второй цели в самые конечные моменты движения к первой цели величина рефрактерности составила +50 мс. Иначе говоря, на большой скорости осуществления действия явление психологической рефрактерности практически отсутствует. Этот факт может служить прекрасной иллюстрацией положения о том, что при совершении движений, управляемых по программному типу, когнитивный компонент действия открыт для новой порции информации, времени на обработку которой и организацию ответа требуется столько же или даже меньше, чем на первый сигнал. Здесь уместно провести аналогию с физиологической рефрактерностью, которая также может иметь отрицательные значения при попадании второго стимула в фазу разлитого возбуждения, вызванного первым. Это сокращение латентного периода можно рассматривать как форму следового эффекта [7].
Поведение кривой рефрактерности на комфортной скорости точно соответствует динамике этой кривой в основной серии экспериментов. Что же касается динамики кривой рефрактерности на медленной скорости осуществления движения, то помимо того, что ее абсолютные значения в 2,5 раза превышают величины, полученные на комфортной скорости, она имеет ярко выраженный волновой характер. И если на комфортной скорости было зарегистрировано две волны, то на медленной скорости имеются четыре волны. Увеличение числа волн свидетельствует, на наш взгляд, об увеличении количества квантов действия. И действительно, движение, совершаемое на медленной скорости, приобретает черты серии развернутых действий с присущей каждому из них структурой [4]. Возрастание абсолютных значений показателя рефрактерности на медленной скорости осуществления движения свидетельствует о том, что в этом случае превалирует афферентационный
87
тип управления. Когнитивные компоненты действия загружены отработкой коррекционных процессов, поэтому на составление программы движения неожиданно появившейся цели требуется существенно больше времени, чем для отработки первого сигнала.
Итак, результаты анализа контрольной серии экспериментов показали, что, во-первых, тип управления движениями меняется в зависимости от скорости осуществления действия и, во-вторых, полученные данные дали новые подтверждения наличия квантов действия в стадии реализации.
Обратимся к характеристике поведения рефрактерности на последней стадии действия. Предъявление второй цели при переходе стадии реализации в стадию контроля и коррекций вызывает наибольший подъем рефрактерности, которая достигает 150 мс (см. рис. 2). В начале стадии контроля и коррекций осуществляются активные коррекционные процессы, направленные на точностное совмещение управляемого пятна с первой целью. Поскольку когнитивные компоненты действия загружены составлением программы коррекционных движений, время на формирование программы нового движения увеличивается и, соответственно, возрастают абсолютные значения рефрактерности. В течение последующих 150—160 мс наблюдается снижение значений рефрактерности до 40 мс. Это снижение можно объяснить затуханием коррекционных процессов, сменяющихся собственно процессами контроля. Далее, в течение 150—200 мс наблюдается период стабилизации значений рефрактерности, величина которой в этот временной интервал составляет 30—40 мс. В этот период, по-видимому, уже закончены коррекционные процессы и осуществляются только процессы контроля за адекватностью совершенного действия, поэтому формирование программы на вновь появившуюся цель проходит значительно легче, чем в период активных коррекционных процессов.
По окончании периода стабилизации вновь наблюдается незначительное повышение значений рефрактерности, доходящее до 75 мс, вызванное подготовкой к построению программы возвратного движения к стартовой позиции. Это дает основания выделить в стадии контроля и коррекций временной интервал, в котором уже закончены процессы, связанные с отработкой первой цели, а активизируются процессы, ответственные за формирование программы следующего движения (в данном случае возвратного). Полученные данные представляют большой интерес для решения вопроса о программировании серийных движений. Они подтверждают гипотезу Н. А. Бернштейна [2] о «цепном» программировании движений, где каждое предыдущее служит экфоратором последующего. Следовательно, в те временные интервалы, в которых когнитивные компоненты действия заняты либо коррекционными процессами, либо отработкой новой программы движения, восприятие любого нового сигнала и организация ответа на него требуют значительно большего времени, чем для отработки первого сигнала.
Выводы. Перед настоящим исследованием стояла задача доказать гетерогенность функциональной структуры целостного сенсомоторного действия и составляющих его компонентов. В качестве объекта исследования было взято точностное дискретное действие, совершаемое за время 1—1,2 с, с достаточно высоким удельным весом моторного и контролирующего компонентов. Использование метода микроструктурного анализа позволило подвергнуть детальному анализу каждый компонент сенсомоторного действия, не изолируя его от других компонентов и тем самым не нарушая целостной структуры действия. Это, в свою очередь, дало возможность проследить, как сказываются изменения, произошедшие в одном компоненте действия, на другие его
88
компоненты, т. е. проследить взаимовлияния выделенных компонентов действия. В качестве исследуемого и анализируемого параметра было взято поведение психологического рефрактерного периода как индикатора свойств структуры целостного действия, так и структуры его отдельных компонентов.
В работе прослежена динамика рефрактерного периода, показан его волновой характер, отмечены зоны наибольшей и наименьшей чувствительности к возмущающим воздействиям. На кривой рефрактерности отмечены зоны наибольших ее значений: первый — в самом начале движения, при МСИ, равном 50 мс; второй — через 100—150 мс от начала стадии реализации первого движения при МСИ 400—500 мс (на комфортной скорости выполнения действия) и третий — в момент перехода стадии реализации в стадию контроля и коррекций первого движения при МСИ 800—900 мс. Эти зоны высоких значений показателя рефрактерности соответствуют зонам наименьшей чувствительности к возмущающим воздействиям. При попадании второго сигнала в зоны наименьшей чувствительности наблюдается не только увеличение времени реакции на второй сигнал, но в некоторых случаях даже увеличение времени стадии реализации. Соответственно на кривой рефрактерности выделены временные интервалы наименьших значений рефрактерности. Первый — конец латентной стадии и начало стадии реализации при МСИ 250—350 мс; второй — при МСИ 600—700 мс (на комфортной скорости), и третий приходится на середину стадии контроля и коррекций при МСИ 950—1050 мс. Наименьшие значения рефрактерности соответствуют зонам наибольшей чувствительности к возмущающим воздействиям. Время реакции на второй сигнал, при попадании его в зоны наибольшей чувствительности, сопоставимо со значениями времени реакции на первый сигнал. При этом скоростные характеристики движения как на первый, так и на второй сигнал равны значениям фоновых проб.
Кроме того, результаты исследования свидетельствуют о том, что при предъявлении второго сигнала через 250—300 мс после первого, т. е. при локализации его в конце латентной стадии или начале стадии реализации, помимо отмеченных минимальных значений рефрактерного периода меняются и структурные характеристики действия. Так, начатое движение, вызванное появлением первого сигнала, после появления второго не прекращается, доходит до зоны первой цели, а затем плавно, без остановки меняет свое направление по пути ко второй цели. Иначе говоря, два дискретных движения превращаются в непрерывное, что, безусловно, экономично с точки зрения достижения конечного результата действия. Следовательно, зная динамику рефрактерности при совершении сенсомоторного действия и зоны чувствительности к возмущающим воздействиям, можно вводить сигналы со строго дозированными пространственно-временными интервалами. Знание этих законов может быть чрезвычайно полезным при необходимости отслеживания двух целей при неопределенности и дефиците времени.
Выделенные в результате анализа зоны чувствительности дают новые основания в подтверждение гипотезы о гетерогенности как каждого отдельного компонента, так и целостного сенсомоторного действия. Волновой характер кривой рефрактерности свидетельствует о наличии квантов в стадии реализации действия, пространственно-временные характеристики которых определяются двигательной задачей, степенью освоенности действия и скоростью его осуществления. Именно наличие квантов действия является решающим доказательством гетерогенности моторного акта и одновременно объясняет возможности перестройки моторного компонента в когнитивный, что может приводить в конечном счете к оперативной трансформации целостного действия.
89
1. Белоховская М. С., Гордеева Н. Д., Девишвили В. М. и др. — Методы исследования деятельности оператора-манипулятора. — Эргономика, № 15, Труды ВНИИТЭ.— М., 1978, с. 108—131.
2. Бернштейн Н. А. Очерки по физиологии движений и физиологии активности. — М., 1966.— 349 с.
3. Гордеева Н. Д., Девишвили В. М., Зинченко В. П. Микроструктурный анализ исполнительной деятельности. — М., 1975.— 174 с.
4. Гордеева Н. Д. Взаимодействие когнитивных и моторных компонентов в функциональной структуре исполнительной деятельности: Тезисы докладов Всесоюзной конференции «Развитие эргономики в системе дизайна». — Боржоми, 1979, с. 246— 252.
5. Зинченко В. П., Мамардашвили М. К.- Проблема объективного метода в психологии. — Вопросы философии, 1977, № 7, с. 109—126.
6. Ребрик С. Б., Гордеева Н. Д., Кричевец А. Н. Типы связей между когнитивными и исполнительными компонентами в инструментальном пространственном действии. Эргономика. Труды ВНИИТЭ. — М., 1978, № 16, с. 115—129.
7. Соколов Е. Н. Механизмы памяти. — М., 1969. — 175 с.
8. Цибулевский И. Е. Запаздывание оператора при отработке зрительных сигналов.— Автоматика и телемеханика, 1962, № 11, т. XXIII, с. 1514—1526.
9. Botwinick G., Thompson G. Premotor and motor components of reaction time. — J. Exp. Psychol., 1966, v. 71, No 1.
10. Craik K. J. W. Theory of the human operator in control systems. II. Man as an element in a control systems. — Brit. J. Phychol., 1948, v. 38, pp. 142—148.
11. Davis R. The human operator as a single-channel information system. — Quart. J. Exp. Phychol., v. 9, part 3, pp. 119—130.
12. Glencross D. J. Control of scilled movement. — Phychol. Bull., 1977, v. 84, No 1, pp. 14—29.
13. Marill T. The psychological refractory phase. — Brit. J. Psvchol., 1957, v. 48, pp. 93—97.
14. Nicker son. R. S. Expectancy, waiting time and the psychological refractory period. — Acta Psychologica, 1967, v. 27, pp. 23—24.
15. Schmidt R. A. A schema theory of discrete motor skill learning. — Psychol. Rev., 1975, v. 82, No 4.
16. Smith M. S. Theories of psychological refractory period. — Psychol. Bull., 1967, v. 67, part 1—6, pp. 202—213.
17. Vince M. A. The intermittency of control movements and the psychological refractory period. — Brit. J. Psychol., v. 38, pp. 149—154.
18. Welford A. T. The "psychological refractory period" and the timing of highspeed performance — a review and a theory. — Brit. J. Psychol., 1952, v. 43, pp. 2—19.
19. Welford A. T. Single-channal operation in the brain. — Acta Psvchologica, 1967, v. 27, pp. 5—22.
20. Welford A. T. On the sequencing of action. — Brain Research, 1974, v. 71, No 2—3.